My Research Projects
Novel Microwave Tomography System Using a Phased-Array Antenna
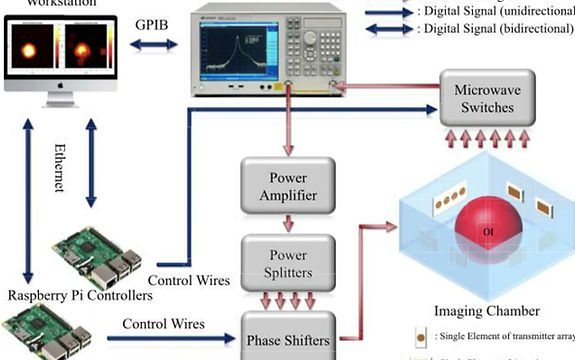
For the senior project designed for my undergraduate degree, my team and I built a Novel Microwave Tomography System using a Phased-Array Antenna. In this project, a single transmitter was used which is a four-element array antenna; by varying the phase for each element in the array, the field distribution inside the imaging chamber varies, which produces different set of measurements per phase configuration. Furthermore, the individual elements of the transmitting array antenna and the receiving antennas were of different types; the receiving antenna type was selected to maximize the coupling between the transmitter and receiver. Due to the system’s complexity, the system was modeled using a neural network; the trained network was used as the forward solver for an inversion algorithm based on a Bayesian Regularized Levenberg-Marquaradt algorithm. The system along with the inversion algorithm was tested using several targets. Further, the performance of the algorithm against various levels of experimental noise was analyzed and evaluated. This work has been published in the Transactions on Microwave Theory and Techniques in August 2018.
A Robotic System for Automatic Identification and Collection of Recyclable Plastic Bottles
For my Master's thesis, I developed a prototype autonomous robot that can identify, and collect plastic bottles from other waste, and return to recycling stations. The focus of this prototype was on the recognition and separation of a particular type of plastic bottle commonly used for packaging drinking water. In this work, the robot navigated to a general location where such plastic waste was expected to be found via GPS based navigation. Then, the robot recognized recyclable plastic bottles, and computed the coordinates of the plastic bottle with respect to the robot, using a stereo camera. Finally, using a robotic arm attached to it, the robot collected the plastic bottle. This thesis did not focus on developing an appropriate gripper to pick up a bottle as it is out of the scope of the current work. To aid the picking process, the end-effector and bottles were fitted with small magnetic attachments. Moreover, the robot developed is 80% and 67% successful, in indoor and outdoor testing respectively. The future versions of the proposed robot may be advanced to segregate the collected plastic bottle waste into appropriate bins located at a recycling station. I have published an abstract on "Recyclable Plastic Detection & Collection Using an Autonomous Robot" in International Conference on Water, Energy and Environment at American University of Sharjah.
